
Tesla has filed a recently-published patent application titled “High-Speed Wiring System Architecture” that addresses an important aspect of its Full Self-Driving (FSD) suite: redundancy.
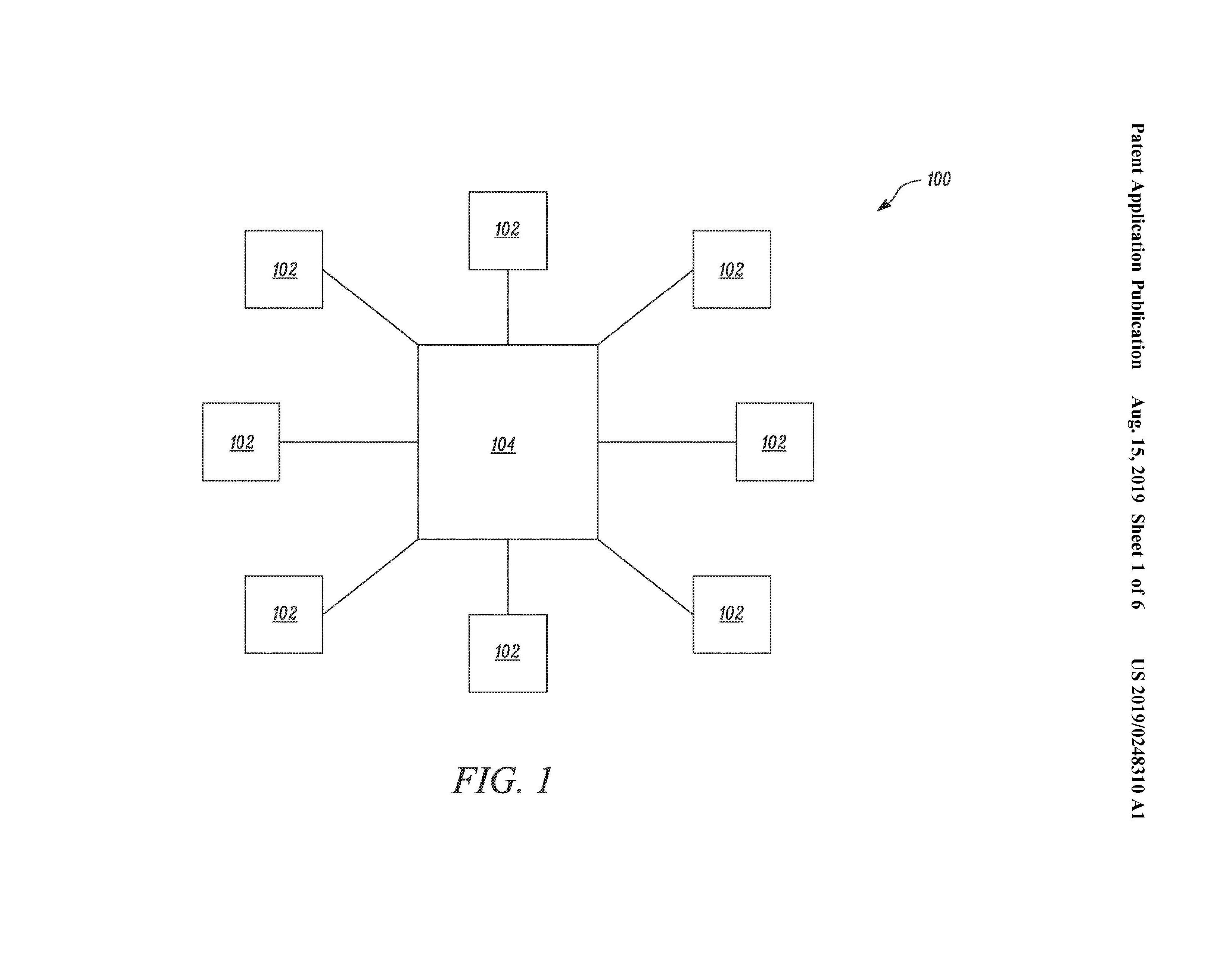
Traditional computer wiring systems often have no redundancy in their communications. Individual devices are connected to a central point (such as a processor), and each device receives communications separately from that point via some sort of cable. If one of the connections fails, communications to the device fails, and in a self-driving situation, that could mean complete system failure.
Simply adding more backup cables isn’t really a great solution, either. More wires mean more connection points, and if you’ve ever worked with microcontrollers or circuit boards professionally or as a hobby, you can already see the downside to this. More connection points mean bigger boards, and bigger boards mean higher manufacturing costs.
This is where Tesla’s new wiring system comes in, which was published on August 15, 2019 as US Patent Publication No. 2019/0248310.
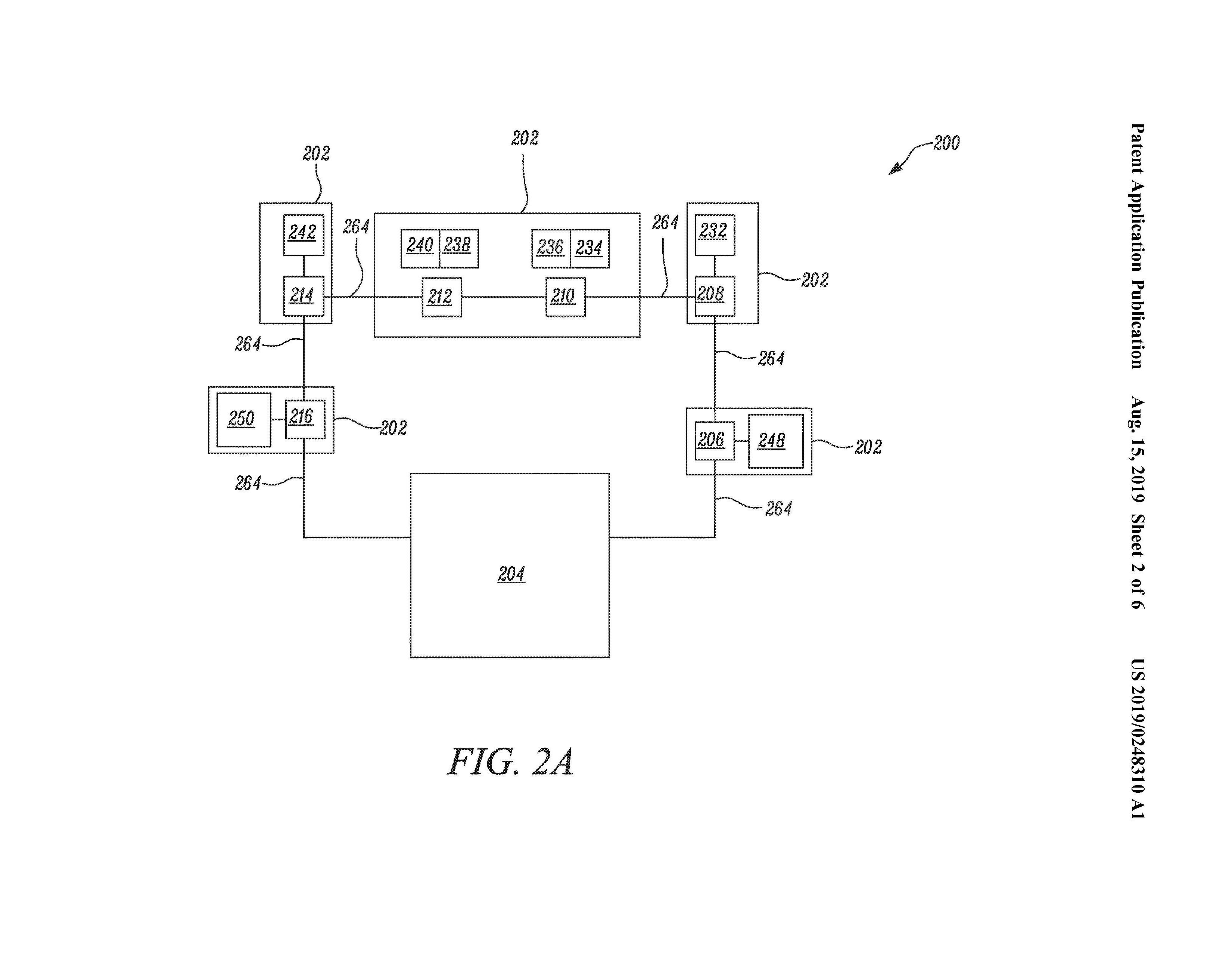
The wiring architecture, as described, comprises a bi-directional backbone cable that forms a loop to and from a processor; along that backbone are connected devices (i.e., segments) with hubs inside associated with one or more cameras and/or radars. The backbone can function as two separate loops, meaning if one portion of the backbone fails, data from all the devices and hubs can still be sent to and from the processor thanks to the dual-loop capacity.
Perhaps a good way to visualize this is to imagine bumper cars or a marble traveling in a loop unimpeded. If a barrier were to suddenly be erected, the car and marble would bump the barrier and travel in the opposite direction. Or, instead of a barrier to bump, imagine a sharp U-turn came up, forcing the travel back in the other direction. The U-turn would happen on either side of the barrier, meaning motion (communication) would still continue back and forth to the processor despite a break in the larger loop (backbone).
The specific advantage of this new architecture over traditional systems, other than less cables connected to the processor, is that each hub within the devices is also connected in serial or in parallel to the other hubs via the backbone. If one hub within a device fails, the other hubs can still transmit to the backbone and thus to the processor. In a traditional system, if one cable to/from a device fails, all communications to/from radars and cameras inside the device fails.
Essentially, what Tesla’s done here is mitigate the damage of one thing failing in an FSD system to just that one thing. Here’s how the application sums up that concept: “In embodiments, when backbone is formed using a bi-directional cable…then the wiring system architecture can tolerate one fault in the backbone while still maintaining communication pathways for all hubs and devices.”
Notably, Tesla’s patent application also specifies that its technology could be used in a variety of vehicles, including semi-trucks, indicating the company may intend to use the architecture as a standard setup for all its FSD programs in the future. Additionally, language is included to broaden the architecture’s application to farming, nautical, and other industrial applications.
A few of Tesla’s recent patent applications have demonstrated numerous efforts being made to improve the safety of FSD systems wherever opportunities for improvement are found. For example, an application published in May titled “System and Method for Handling Errors in a Vehicle Neural Network Processor” describes a way to safely handle errors encountered in self-driving software. Another application titled “Autonomous Driving System Emergency Signaling” describes a method of quickly communicating emergency information from vehicle sensors feeding into autonomous driving software. While Full Self-Driving may take a significant amount of time to be fully implemented for a variety of reasons, there’s no question that Tesla is working hard to make it a reality.
<!–
–>